
123D Catch, photogrammetry in the cloud
Testing Autodesk software with a little, tiny subject
A netsuke is a tiny sculpture that was invented in 17th-century Japan to serve a practical function: traditional Japanese garments in fact had no pockets so people had to place their belongings in containers (called sagemono) hung by cords from the robes' sashes (obi). Whatever the form of the container, the fastener that secured the cord at the top of the sash was a carved, button-like toggle called a netsuke. A little, funny, ivory netsuke was used as a test shape to carry out some experiments on 123D Catch, the digital photogrammetric software by Autodesk part of 123D suite.
Read more of my experiment and some updates!
Even if 123D Catch is qualified as a hobbyist software, it can be effective and productive especially surveying tiny objects. My netsuke was tested shooting nearly 42 pictures, taken during a cloudy afternoon in my backyard. 
 In fact, good light is paramount in order to catch valid photos: light has to be diffused, creating not too contrast in shadows. No white points allowed (matte surfaces are recommended). Then, pictures have to represent correctly the subject and part of its surroundings, superimposing views with 30% of homogeneous sides, in order to allow homology recognition among pixels.
In fact, good light is paramount in order to catch valid photos: light has to be diffused, creating not too contrast in shadows. No white points allowed (matte surfaces are recommended). Then, pictures have to represent correctly the subject and part of its surroundings, superimposing views with 30% of homogeneous sides, in order to allow homology recognition among pixels.
A key strategy in 123D Catch approach is the use of not-so-highly-defined pictures: in this experiment (after several other tests) I left my Nikon SLR in the drawer and I chose my old Panasonic Lumix DMC-FZ5 in order to take some photos. Even if the software seems to ignore different settings from picture to picture, I preferred fixed parameters for my shots. Briefly, no. 42 2560x1920 pixel pictures, 72 dpi, sRGB color space, F-Stop f/4, exposure 1/320 sec., ISO 80, focal distance 6 mm. That's it!


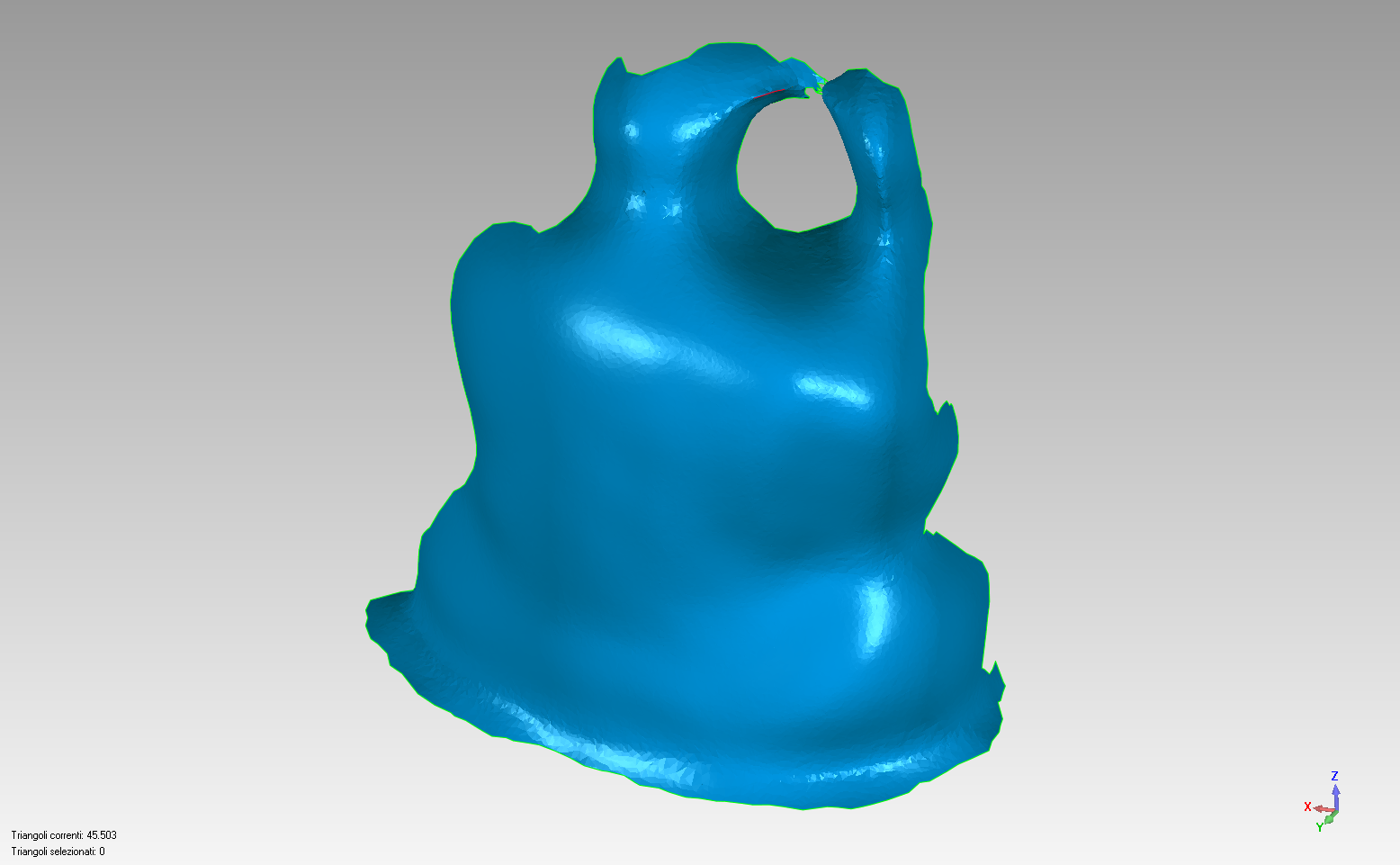
 My DSL home connection is not so brilliant: it took about 28 minutes to upload the whole photoset to Autodesk cloud servers. After another 11 minutes, resulting textured mesh was downloaded in lo-def. However, 11 pictures were not automatically recognized and homology had to be manually set, aligning other 44 reference points. Once submitted again, the final result is documented in side gallery. But how much is 123D Catch metrically correct? To answer this question I decided to acquire a good metric information using two different laser scanners: Leica C5 (time of flight) and Faro Focus 3D (phase shift). Ivory produces some scattering noise using both laser technologies, but comparison between these devices will be much more delved into in some future scientific paper. Now I'm interested in my little netsuke.
My DSL home connection is not so brilliant: it took about 28 minutes to upload the whole photoset to Autodesk cloud servers. After another 11 minutes, resulting textured mesh was downloaded in lo-def. However, 11 pictures were not automatically recognized and homology had to be manually set, aligning other 44 reference points. Once submitted again, the final result is documented in side gallery. But how much is 123D Catch metrically correct? To answer this question I decided to acquire a good metric information using two different laser scanners: Leica C5 (time of flight) and Faro Focus 3D (phase shift). Ivory produces some scattering noise using both laser technologies, but comparison between these devices will be much more delved into in some future scientific paper. Now I'm interested in my little netsuke.
Then, I used Geomagic built-in best fit alignment algorithm between the 123D Catch mesh (with millimetric references offered by graph paper) and the laser scanned object. Geomagic uses an iterative closest point algorithm (ICP). Final results on the best exposed surface, netsuke's back, are very interesting. The original stutue is about 5 cm. wide so everything over 2 or 3 mm. would have been great! 123D Catch produce a watertight mesh with a standard deviation in investigated area equal to 1.486 mm.! Impressive! Maximum deviation from roughly cleaned laser scanner mesh is ±3 mm. but with those values in tangential points, where the laser beam is slightly unprecise.
In the end, 123D Catch can be considered as a huge evolution from original Photofly project. It is reliable on small, clear objects, even if much care has to be taken in model's light environment.
It's now time for some more tests on exteriors. In the gallery, every single step of my experiment (click to enlarge).




Update
|
So, 123D Catch proved to be reasonably reliable on capturing metric data for tiny objects, if peculiar precision is not needed and 3D models are required for LOD scenes in which small figures are not in foreground.
However, I tried a comparison between Autodesk's cloud software and the well-known free software VisualSFM by Changchang Wu since they both are homogeneous photogrammetric packages.
VisualSFM was used on a Nvidia Quadro FX3800 powered pc, using a Cuda specific release with 64bit CMVS for Windows by Pierre Moulon for dense point cloud reconstruction.
VisualSFM is a GUI application for 3D reconstruction using structure from motion (SFM), installed on a local pc and not in the cloud. I used the same photoset streamlined to 123D Catch and comparison results were included into a deviation range between ±0.6 mm. Standard deviation is also interesting. Concluding, 123D Catch is maybe more practical than VisualSFM gui, however it has some difficulties dealing with planar surfaces, even if VisualSFM produced good planes but organic mesh full of holes for this small object.
In the left column, some screencaptures from my latest comparison test.
|




Nessun commento
Info
Dal 2004 questo piccolo angolo di rete raccoglie gli interessi di ricerca e i lavori di sperimentazione digitale di Simone Garagnani in materia di cultura geek, ma soprattutto di Building Information Modeling, rilievi digitali ad alta risoluzione e computer graphics legata al mondo dell'architettura, dell'ingegneria e delle costruzioni. TC Project, è presente anche sul social network Facebook.
Welcome to these pages that host since 2004 Simone Garagnani's personal blog, a collection of nerd notes and geek experiences focused sometimes on Building Information Modeling, terrestrial laser scanning, digital photogrammetry and computer graphics applied to the AEC world. The TC Project is also available on Facebook.
Segui le attività in TC Project: Registrazione
Follow TC Project activities: Registration/login
GreenSpider
 |
GreenSpider plug-in for Autodesk Revit |
Ultimi commenti
Trevor Dwyer (VIC-20 The friend…): Hi there, I feel your pain on updates and the internet not being the same these days – well since 199…SiliconSimon (Cray-1 - The home…): If someone is interested in my little Cray’s files, please PM me since I do not often read comments o…
SiliconSimon (Cray-1 - The home…): Of course Mike, I sent you a PM!
Robert (Cray-1 - The home…): If it’s possible, I would love to get the files from you for this project. I have a Cray-1 chip sitti…
Mike (Cray-1 - The home…): Are the files still available?
MojaMonkey (SGI VW540 @ TC La…): Hi Simon? This is a long shot but I was wondering if you have a copy of the SGI drivers required to…




